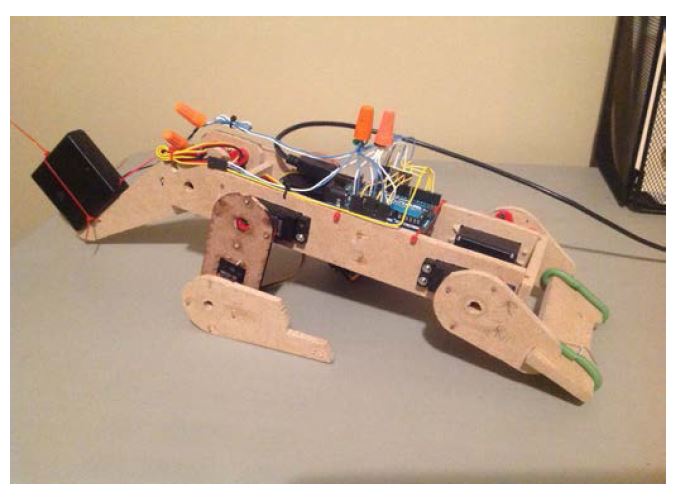
Abstract: The goal of the project is to build a bio-inspired mechanism that would autonomously walk for 4.9m one way and 4.9m back. The project provided an important lesson in robot design, as well as installation and programming of servos. A kangaroo robot was built and it successfully completed the goal.
Full Bio-Inspired Robot Project Report
