
For the Design of Mechanical Systems course at the Illinois Institute of Technology, my group and I brainstormed and did prototypes for a couple ideas. More on the final project can be found here.

For the Design of Mechanical Systems course at the Illinois Institute of Technology, my group and I brainstormed and did prototypes for a couple ideas. More on the final project can be found here.
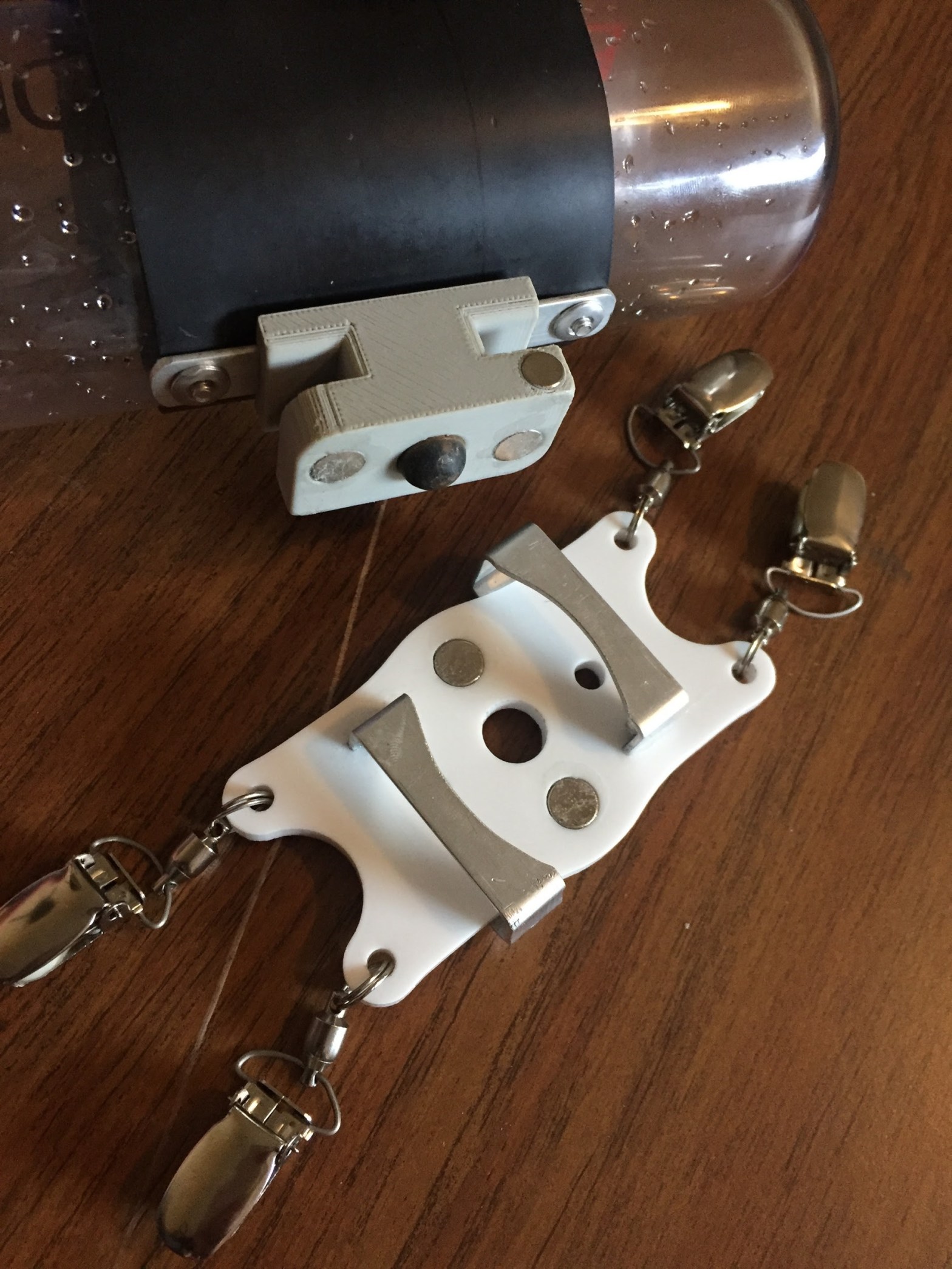



Abstract: The goal of the project is to design and build an automated ingredient dispenser for dry baking and cooking goods. The functional requirements were to make the dispenser quick (dispense in less than 10 seconds); accurate (+-5% weight tolerance), have variety of volume measurement (3 kinds of volume) and have variety of ingredient to dispense (up to three kinds of ingredients).
Full Technical Report: Automated Ingredient Dispenser
Technical Drawings: Automated Ingredient Dispenser

Reports for various experiments conducted during Mechanical Lab II course at Illinois Institute of Technology in Fall 2018.


The purpose of this personal project was to install a sound system which would play sound inside and outside of the car (holes were cut into a “spare” trunk). This idea wasn’t based on trying to play music, but I wanted to play sounds of different car engines. So a little Kia Rio might be next to you at a stop light, but when it pulls away it would sound like it has a sports-engine. I thought this might also be applicable to electric cars, to give the driver a feeling of a “real” engine. I do not have photos of the complete project, before I took pictures, the car was broken into and items were stolen. I hope the photos I do have, show that I like to do clean work.


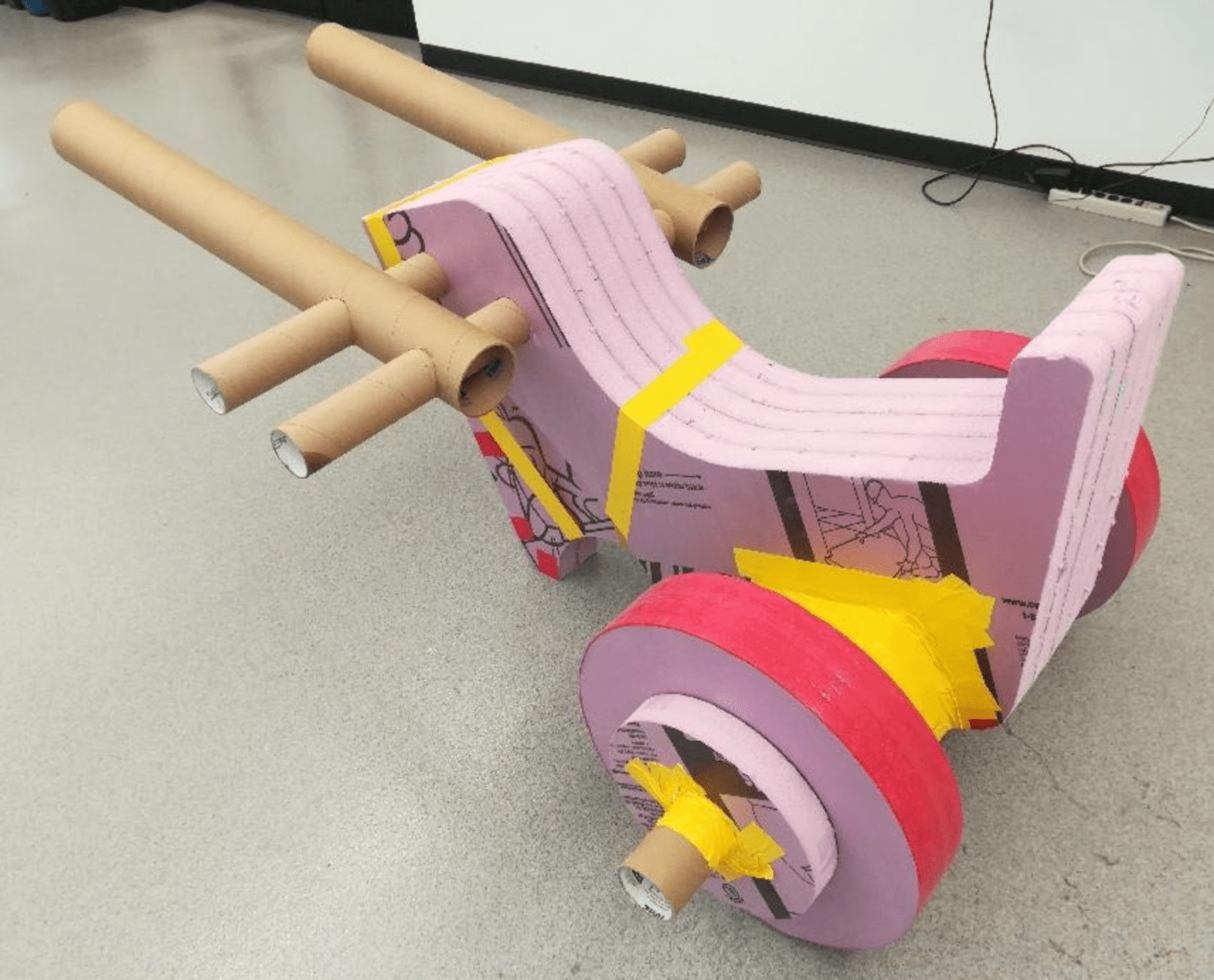
Abstract: The goal of the Sustainable Foam Core Chair project is to design and build a chair that could hold an 80kg person. The chair must be made of 3/16” thick foam core board. In addition, no fasteners, glue or screws can be used to assemble the chair parts. The chair’s mass is limited to 500g. Results show the chair was designed within the limits and was able hold a weight of at least 80kg.

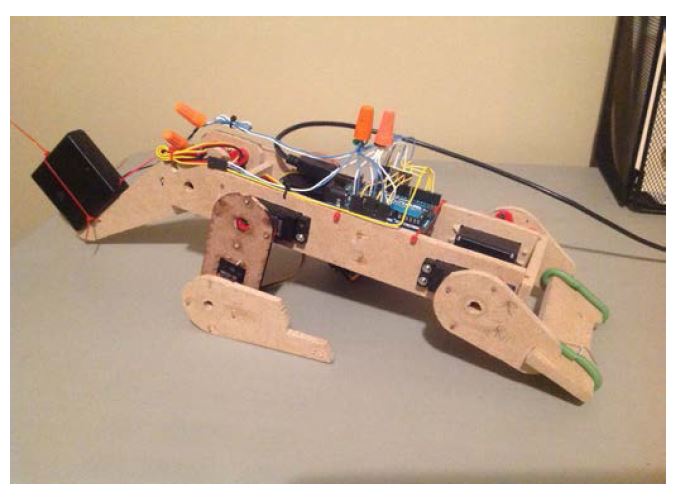
Abstract: The goal of the project is to build a bio-inspired mechanism that would autonomously walk for 4.9m one way and 4.9m back. The project provided an important lesson in robot design, as well as installation and programming of servos. A kangaroo robot was built and it successfully completed the goal.
Full Bio-Inspired Robot Project Report


Abstract: The goal of this project is to design and build a functional trebuchet. It should be able to launch 27g rubber ball for more than 12m. Majority of parts are made of ¼ inch MDF boards which were put together by using fasteners and wooden glue. First design of trebuchet successfully launched ball over 12m.

